Abstract
This project implements precise path planning and real-time control for a custom CSPR to calibrate a 6×9 m motion-capture space. Leveraging NEMA 17 motors, AS5600 encoders, Dyneema SK99 cables, and an ESP32S3-based controller, the system executes closed-loop trajectories while avoiding obstacles via RRT*. Full methodology is detailed in the technical report.
Mechanical Design
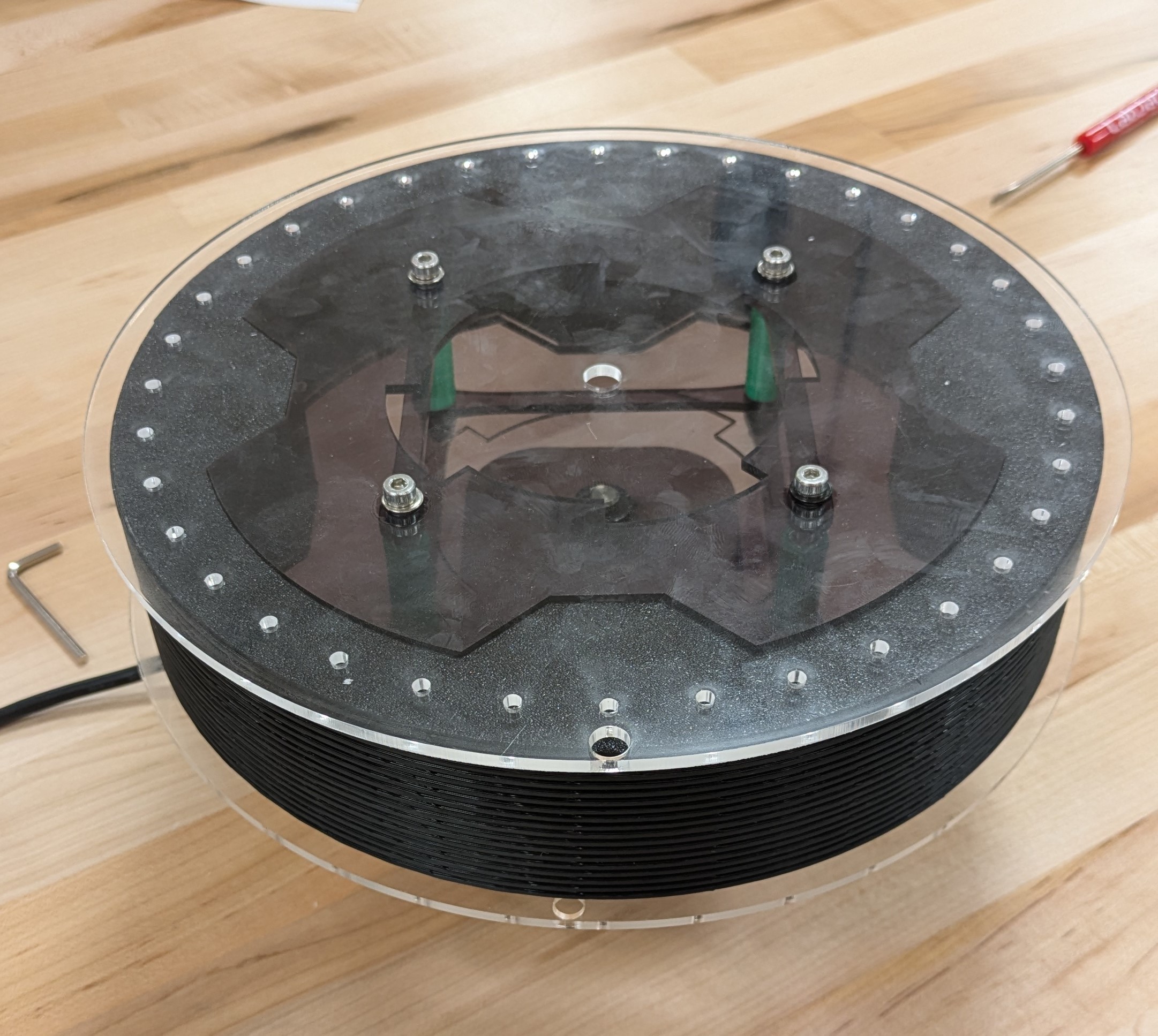
Drum & Cable Interface
PLA “squircle” drums with acrylic endplates and nylon standoffs enabled slippage-free winding.
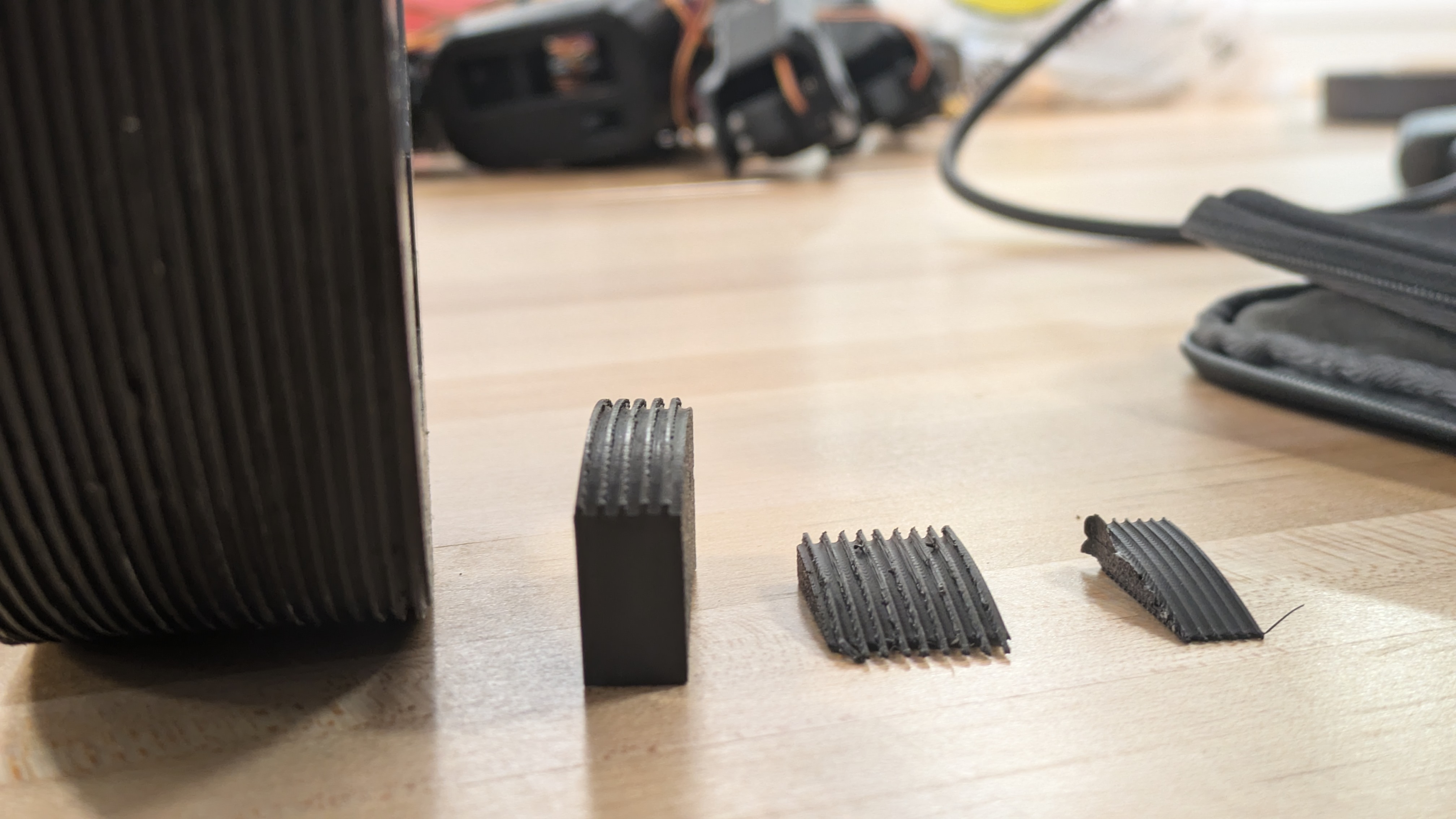
Drum Slot Evolution
Groove profiles iterated through square, round, and squircle to optimally cradle the rope.
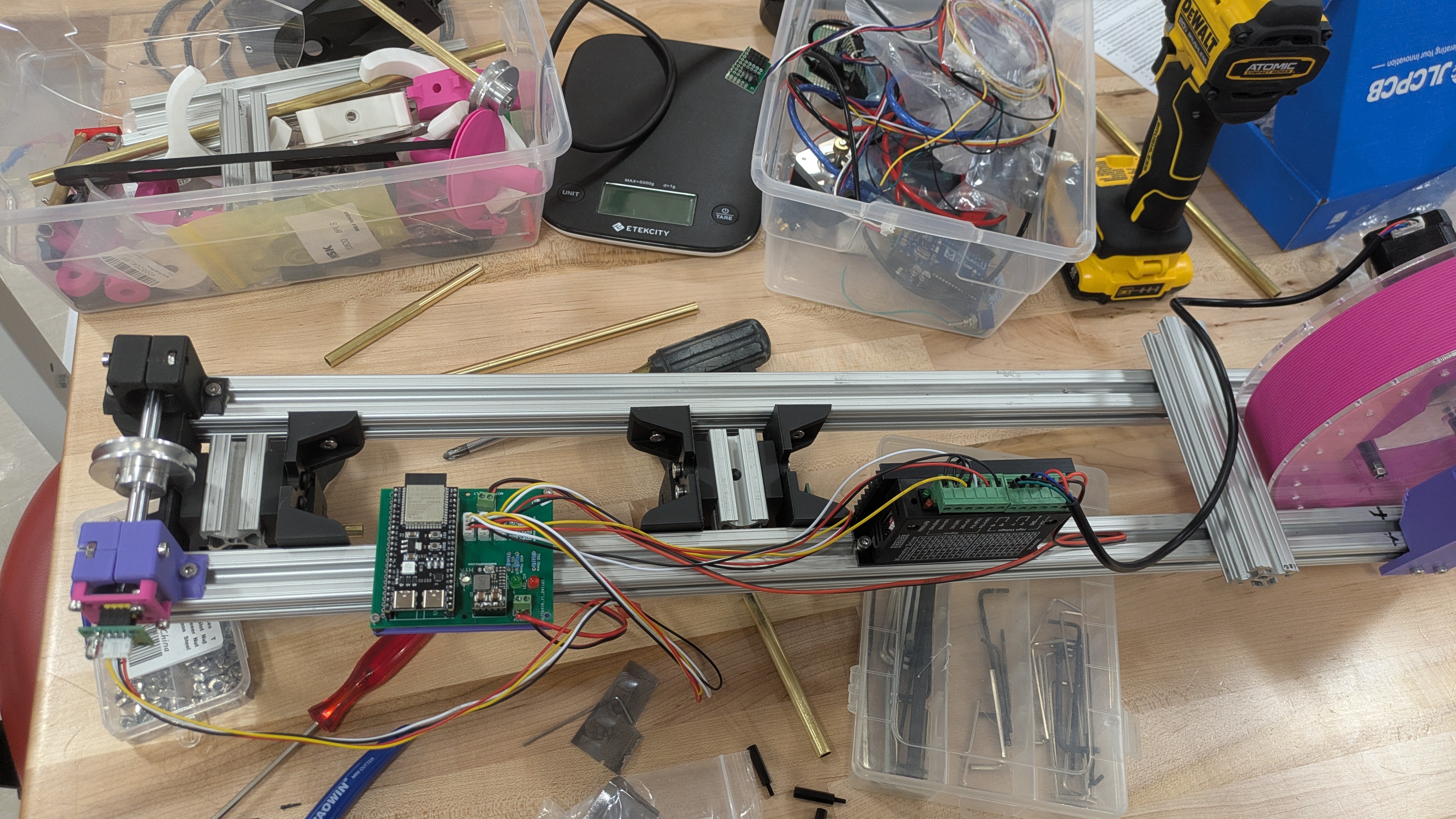
Room Corner Setup

Electronics & Firmware
AS5600 Interface
Custom PCB with pull-ups, PH-4 headers, and stable 1 kHz I²C sampling.
Main Control Board
- ESP32S3 (dual-core, FreeRTOS)
- TB6600 stepper drivers (1.5 A RMS)
- Web dashboard with real-time telemetry
Interactive PCB Viewer
Rotate, zoom, and inspect the PCB in-browser.
Control & Kinematics
Inverse Kinematics & PID
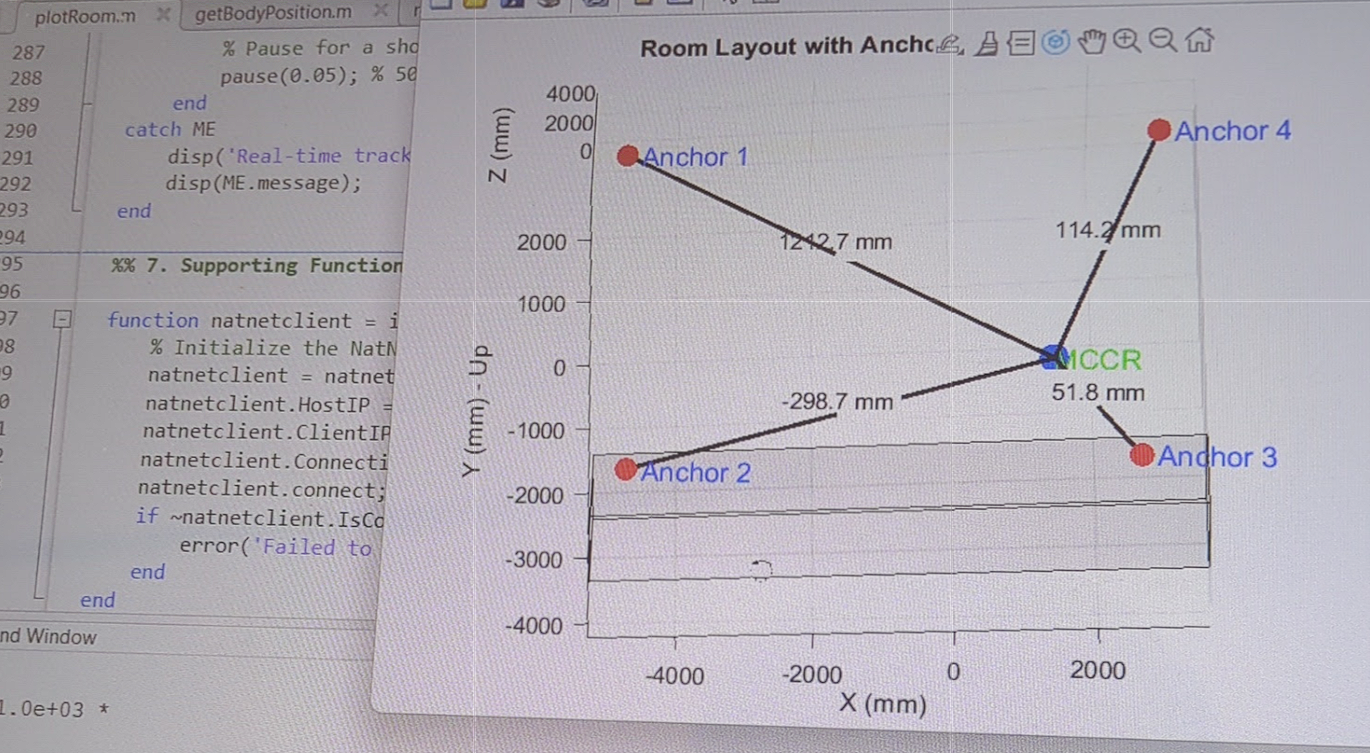
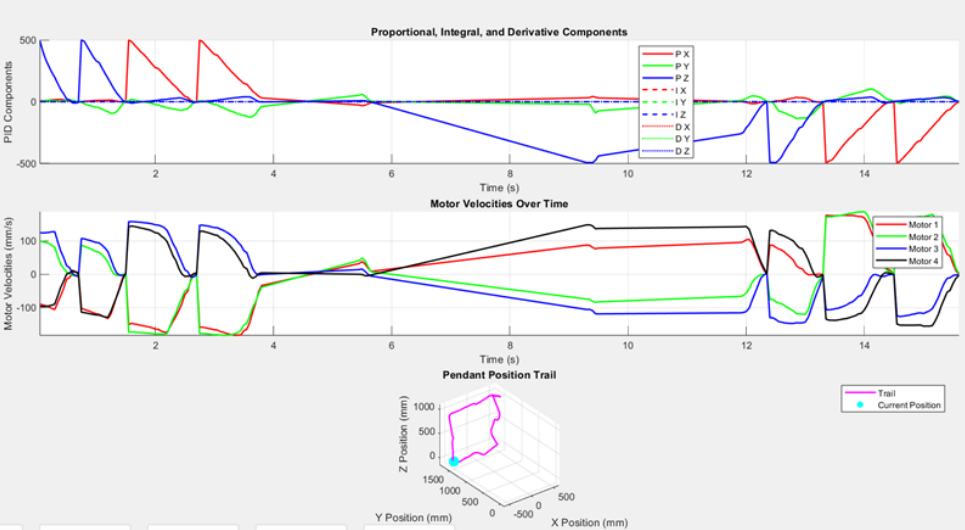
NatNet streaming feeds 3D position to an IK module that computes target cable lengths. PIDF control loop (50 ms) ensures accurate tracking.
RRT* Path Planning
RRT* finds obstacle-free paths that respect workspace constraints and convergence goals.
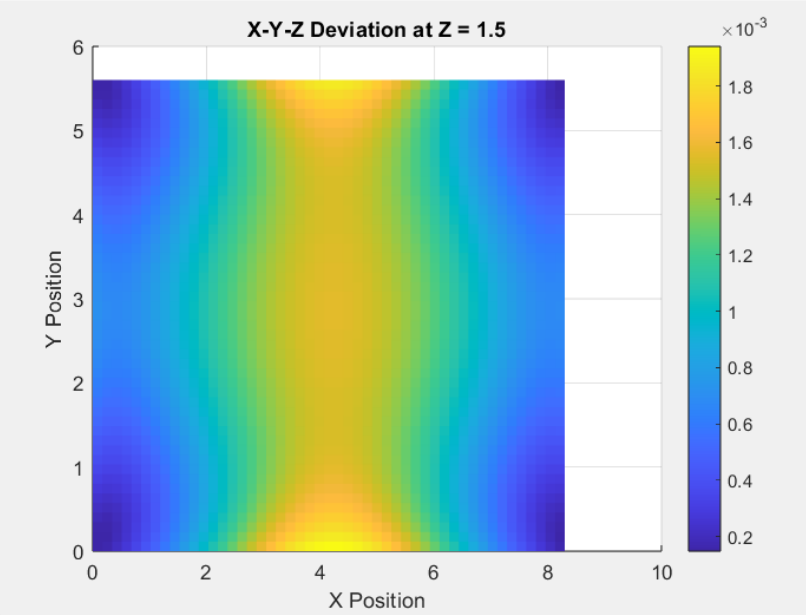
Simulation & Validation
Custom MATLAB-based simulator helps visualize planned vs executed paths and MoCap data.
Experimental Results
Square path (2 m) yielded <35 mm RMS error under dynamic loading.
Future Work
- Real-time active tensioners
- Hybrid RRT* + LQR planning
- Full 6-DoF control
References
- Mehta, A. (2025). Design and Path Planning for a Cable-Suspended Parallel Robot. PDF
- Dyneema SK99 Datasheet
- Pott & Bruckmann. (2013). Cable-driven parallel robots. Springer.
- Zi & Qian. (2017). Cable-driven parallel manipulators. Springer.