A bio-inspired robot designed for the Spring 2024 Robosoft competition, showcasing the potential of soft robotics.
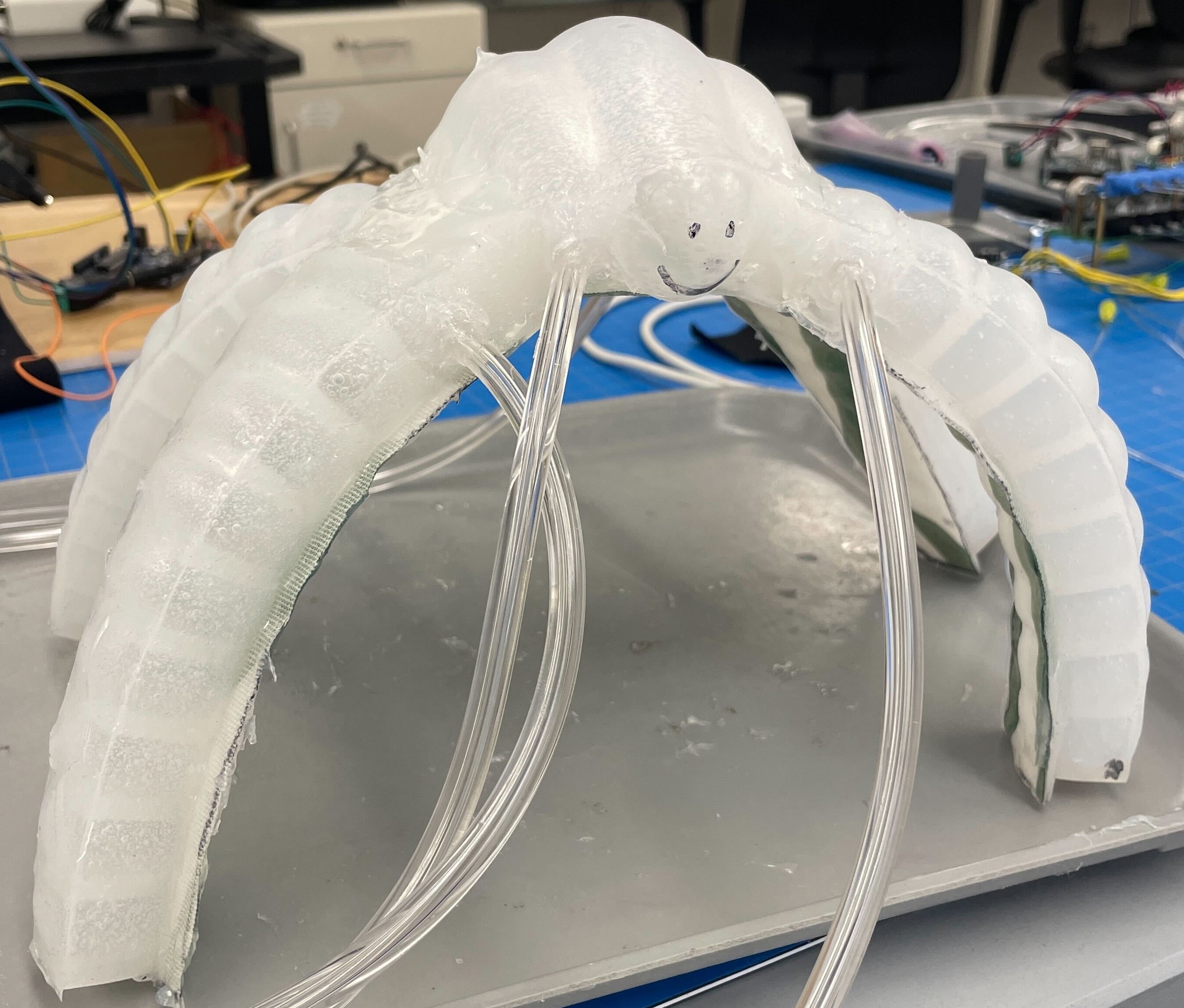
The Soft Robotic Starfish is a bio-inspired soft robot designed using soft pneumatic actuators, origami bellows, and granular jamming mechanisms. It was created to mimic the locomotion of a starfish, enabling it to adapt to complex environments, making it suitable for tasks such as search-and-rescue and human-robot interaction.
The robot was designed with a hexagonal body and four legs, inspired by previous soft robot designs. The body and legs were manufactured using 3D printed molds and silicone materials. The legs were attached using a spin-coating process with fabric layers for added durability.
Various actuation and control mechanisms were integrated to enable locomotion and object manipulation.
The project faced challenges such as ensuring durable material connections, optimizing leg actuation, and overcoming fabrication limitations.
Click below to download or view the technical documents related to this project.