A virtual robot programmed using emu8086 to autonomously solve any maze using a left-hand side following algorithm.
This project involves developing a virtual robot controlled by the emu8086 microprocessor. The robot autonomously navigates a maze using a left-hand side following algorithm. The maze is created within the emu8086 environment, and the robot follows predefined commands to move, turn, and examine the surroundings to solve the maze.
The primary challenge addressed was to program a virtual robot that could reliably navigate and solve a given maze. The left-hand side wall-following algorithm was selected for its simplicity and effectiveness in mazes where all walls are connected to the outer boundary.
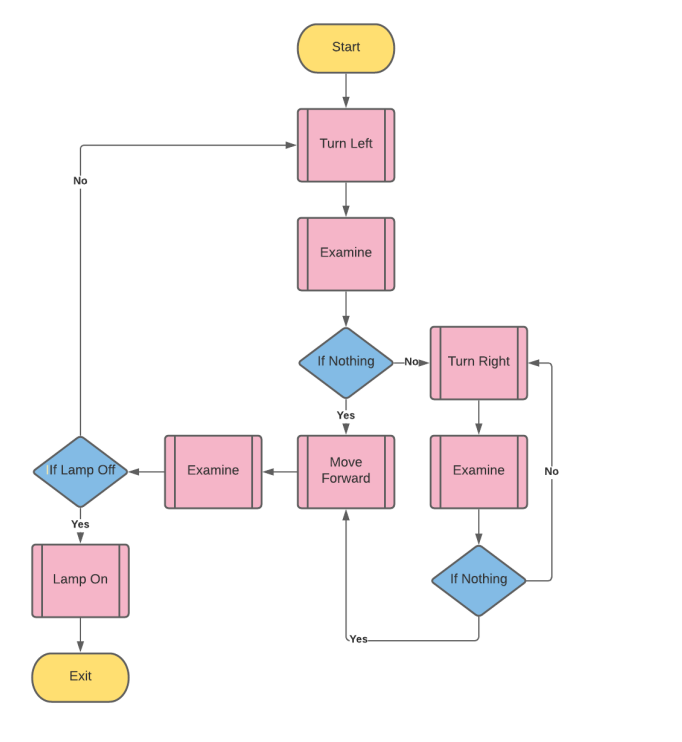
The left-hand side wall-following algorithm ensures that the robot follows the wall on its left-hand side to navigate the maze. It examines objects in front of it using sensors and makes decisions accordingly (move forward, turn left, or turn right). The robot continues to follow this pattern until it reaches the goal (a lamp).
Click below to download or view the technical documents related to this project.